

Глубина или
полнота ::: Продолжение
В опубликованных ранее терминологических заметках Глубина или полнота (см.
также здесь)
были рассмотрены некоторые вопросы, возникшие при первичном ознакомлении с
документом [1].
Ещё больше вопросов возникает при переходе к методикам
определения полноты контроля по методике, изложенной в этом документе, где глубину[1]
контроля предлагают определять по формуле (1):
![]()
где λk,
λо – интенсивность отказов объекта контроля и его контролируемой
части соответственно, а используют этот показатель в качестве расчетной
оценки методической достоверности контроля [2].
При
этом соотношение между показателями λо и λk в [1] никак не
оговаривается. Необходимо обратить внимание на то, что при λо = λk
полнота контроля η всегда равна 1, независимо от того, как
организован контроль, т.е. какова его глубина
При
λо> λk полнота контроля меньше единицы, а при λk > λо значение η
становится больше 1, что требует пояснений.
Приведу
здесь цитату из стандарта [2]:
|
Полнота контроля –
составляющая методической достоверности контроля технического состояния
изделия, характеризующая возможность выявления отказов[2]
в этом изделии при выбранном методе контроля его технического состояния. |
На
мой взгляд определение этого понятия, данное в [2], не делает определение термина
«полнота контроля» более понятным.
Подходя
формально к этой формуле, можно предположить, что наличие контроля может
изменить значение интенсивности отказов. Но самом деле, система контроля может
только информировать об исправном или несправном состоянии или предупредить о
появлении того или иного предвестника
отказа [3, 4].
Для
снижения интенсивности
отказа элемента (детали, узла и т.п.) нужно использовать не формулы,
подобные (1), а применять более надежные элементы, детали, узлы и т.п. , а
также использовать схемные решения, повышающие надежность объекта.
Несмотря
на то, что формула (1), предложенная для оценки полноты контроля, на первый
взгляд ориентирована на использование показателей интенсивности отказов
контролируемой и неконтролируемой части объекта, для оценки этого показателя согласно
[1] прежде всего нужны:
-
функциональная схема ОК и описание принципов его работы;
-
перечень контролируемых параметров и стимулирующих сигналов (при их наличии);
- перечень видов отказов.
И только в последнюю очередь в тексте
документа [1] упомянута интенсивность отказов.
Примеры
определения полноты контроля для традиционных изделий, в которых контролируют
аналоговые сигналы приведены в документе [1].
В
данной публикации рассматривается определение глубины контроля в современных
системах, где их составные части объединены с помощью каналов связи, по которым
в цифровом виде передают на единый пульт управления сигналы, управляющие
работой составных частей системы, а также информацию о входных и выходных
сигналах составных частей системы.
Указанная
особенность такой системы предполагает, что перечень контролируемых входных и
выходных сигналов и сигналов, управляющих работой составных частей задается ещё
на этапе проектирования системы, тогда же задается и функциональная схема ОК.
Рассмотрим
применение методики, описанной в [1] для системы, в которой составные части
объедены в единую систему с помощью линий связи, использующих технологию Ethernet.
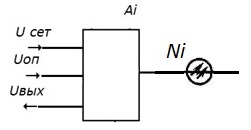
Основу
системы составляет множество блоков Аi, на входы которых поступает сетевое напряжение
Uсет
и оперативное питание Uоп
постоянного тока, а на выходе формируется выходной сигнал Uвых,
подаваемый на вход потребителя.
В
линию связи Ni,
соединяющую блок Аi
c
коммутатором,
поступают сигналы управления, информация о состоянии коммутационных аппаратов в
блоке Аi,
информация о входных и выходных сигналах блока и другая информация и
управляющие сигналы (рисунок 1).
|
|
|
Рисунок 1 – Информационная
модель блока Ai |
|
Uсет –питания блока Ai от сети 380 В, 50 Гц, Uоп
–оперативное питание блока от сети 220 В, Uвых –
выходное напряжение блока Ai, Ni – множество информационных и управляющих сигналов
блока Ai |
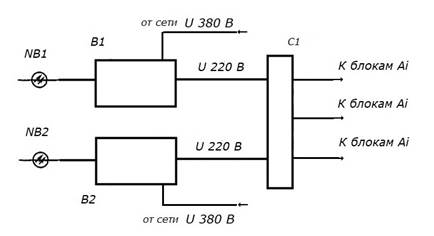
Помимо
блоков Аi
в систему входят блоки В1 и В2, обеспечивающих систему выпрямленным
напряжением 220 В, устройство С1 резервирования питания и распределения
нагрузки между блоками В1 и В2. Устройство С1 выполняет
также функцию распределительного устройства от которого на блоки Аi поступает оперативное питание 220 В (рисунок
2).
|
|
|
Рисунок
2 – Информационная модель подсистемы оперативного
питания |
|
NB1, NB2 – множества
информационных и управляющих сигналов блоков В1 и В2 |
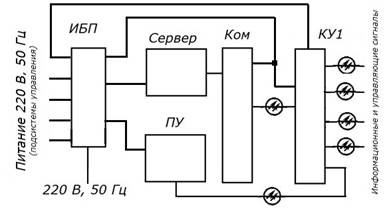
Информационная
модель подсистемы управления представлена на рисунке 3.
|
|
|
Рисунок
3 – Информационная модель подсистемы управления Ком – коммутатор
подсистемы, ПУ – пульт управления, КУ1 –коммутационное
устройство, объединяющее информационные и управляющие сигналы от оборудования
системы, ИБП – источник бесперебойного питания |
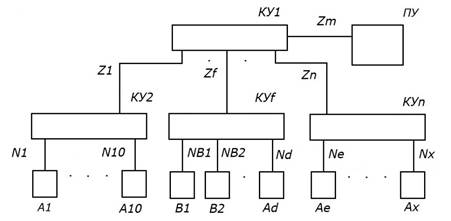
Информационная
модель системы, объединяющая приведенные на рисунках 1 – 3 части, приведена на
рисунке 4. Для упрощения модели на рисунке 4 не показаны электрические связи
составных частей системы с источниками питания.
С
выхода коммутатора КУ2 на следующий уровень передают множество информационных
и управляющих сигналов Z1 ⊃
{N1…N10} от
блоков А1 – А10.
На
следующий уровень с выхода коммутатора КУf передают
множество информационных и управляющих сигналов Zf ⊃
{NВ1…Nd}.
Множество
информационных и управляющих сигналов Zn
⊃ {Ne…Nx} передают C выхода коммутатора КУn на следующий уровень
Множество
сигналов Zm
⊃ {Z1…Zn} после обработки поступает на пульт
управления ПУ.
|
|
|
Рисунок
4 – Информационная модель системы А1…Ах – блоки Аi (см. рисунок 1), В1, В2 – блоки
оперативного питания (см. рисунок 2), КУ1
– КУn – коммутационные узлы, ПУ –
пульт управления, |
Построенная
информационная модель системы позволяет перейти к формированию таблицы полноты
контроля, в которой число строк соответствует числу множеств контролируемых
параметров, а количество столбцов соответствует числу блоков в информационной
модели.
В
каждой строке, соответствующей определенному множеству контролируемых
параметров. На пересечении со столбцом. Соответствующем контролируемой части
системы, проставляется «1», если выход любого из множества контролируемых
параметров за допуск, соответствует отказу составной части (таблица1).
В таблице 1 множество характеристик и сигналов
управления коммутатором КУ2 обозначено как Z11,
Таблица
1
|
Контролируемое множество |
Обозначение составной части системы
|
|||||||
|
А1 |
А2 |
B1 |
|
|
КУ2 |
|
КУn |
|
|
N1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N10 |
|
1 |
|
|
|
|
|
|
|
NB1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zn1 |
|
|
|
|
|
|
|
1 |
|
Z11 |
|
|
|
|
|
1 |
|
|
|
ИСП |
1 |
1 |
1 |
|
|
1 |
|
1 |
После
составления таблицы 1 определяют по формуле (13) из [1] численное значение
полноты контроля составных частей системы:

где
λi
– интенсивность отказов i-ой
составной части системы (см. рисунок 4);
ai = 1, если в
соответствующей клетке строки ИСП (см. таблицу 1) стоит «1»;
n – множество составных частей системы.
Согласно
информационной модели системы все её составные части контролируют, что
подтверждается наличием «1» во всех столбцах строки ИСП. Учитывая это,
числитель и знаменатель формулы (2) равны друг другу, независимо от значения
интенсивности отказов той или иной части системы, поэтому полнота контроля
системы, модель которой представлена на рисунке 4 будет равна единице:
![]()
Литература
1 МУ 108-84. Методы оценки
достоверности контроля авиационной техники. Методика определения полноты
контроля и глубины поиска отказов.
2 ГОСТ 19919-74. Контроль
автоматизированный технического состояния изделий авиационной техники. Термины
и определения.
3 Дубецкий Л.Г.
Предвестники отказов в изделиях электронной техники. М.: Радио и связь, 1989
4 Дмитриев А.К. Распознавание отказов в
системах электроавтоматики. Л.: Энергоатомиздат, 1983
5 Захаров О.Г. Поиск
дефектов в релейно-контакторных схемах. – М.-Вологда, 2024 (7 издание).
[1] Здесь нельзя не
обратить внимания на отсутствие в [1] строго разделения понятий, обозначаемых
терминами со словами «полнота» и «глубина»
[2] Отказ – событие,
заключающееся в нарушении работоспособного состояния объекта
 :::
МОИ САЙТЫ
:::
:::
МОИ САЙТЫ
:::



© ЗАХАРОВ О.Г.
2024::: правка 2025

:::10.07.2024_10-15:::22.04.2025_13-47
{kind=link}